Ju Wu


Email1: j-wu19@outlook.com. Email2: juwu21epfl@gmail.com My. CV
Upcoming events:
Recent experiences:
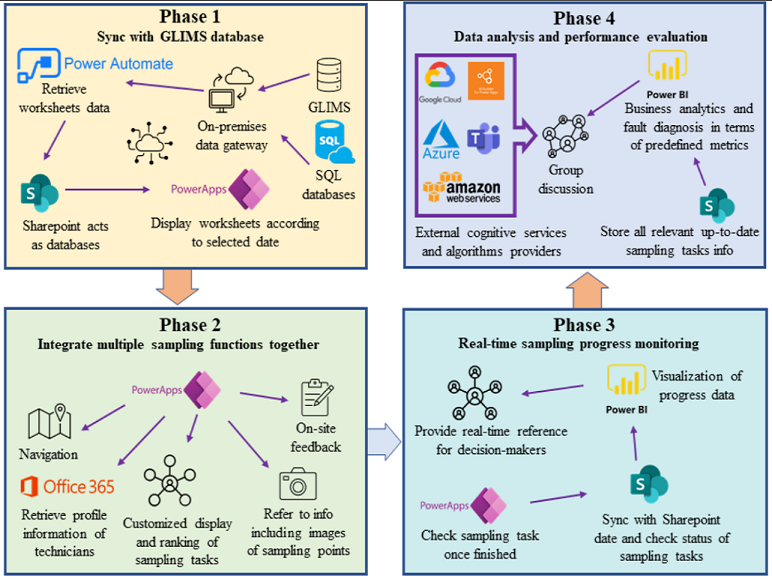
- * Software engineer intern in Merck Serono to develop semantics-driven digitalization framework for maintenance activities by integrating the digital resources and tools. 04/2022-10/2022. [Slide] [Report] [Media]
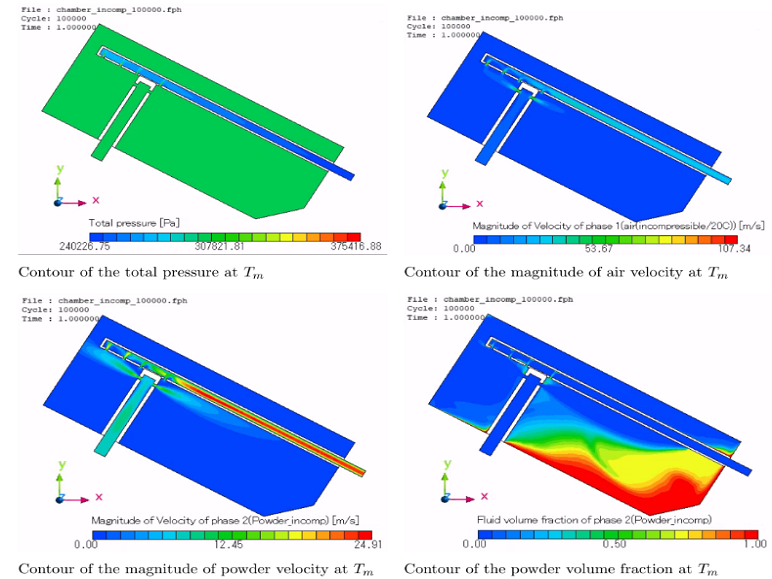
- * R&D intern in E.M.S. Electro Medical Systems S.A. Dental Group working on multiphase simulation and continuous improvement of products. 09/2021-12/2021. [Slide] [Report] [Media]
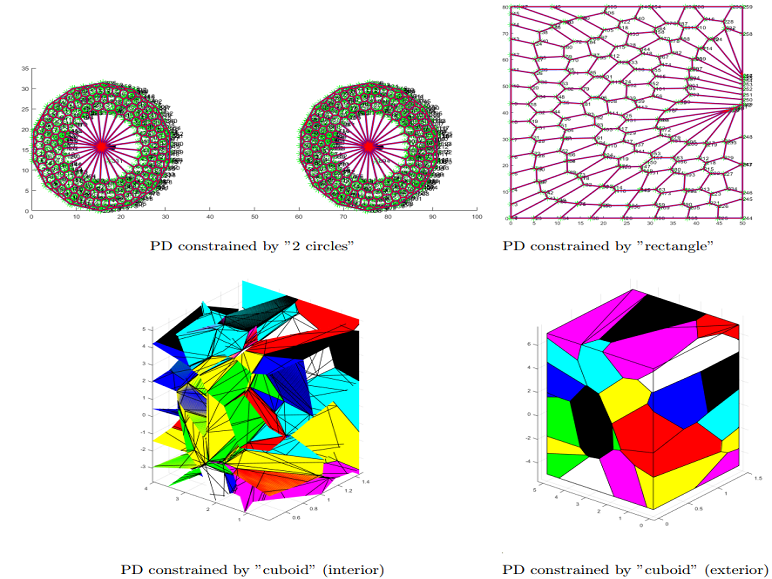
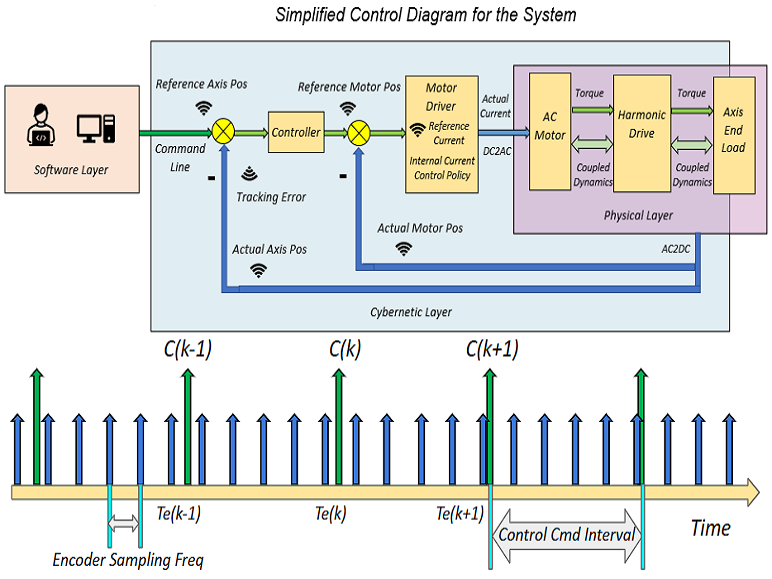
- * Scientific assistant in EPFL on data-driven modelling and control of mechatronic systems. 11/2022-02/2023. [Slide] [Report] [Media]
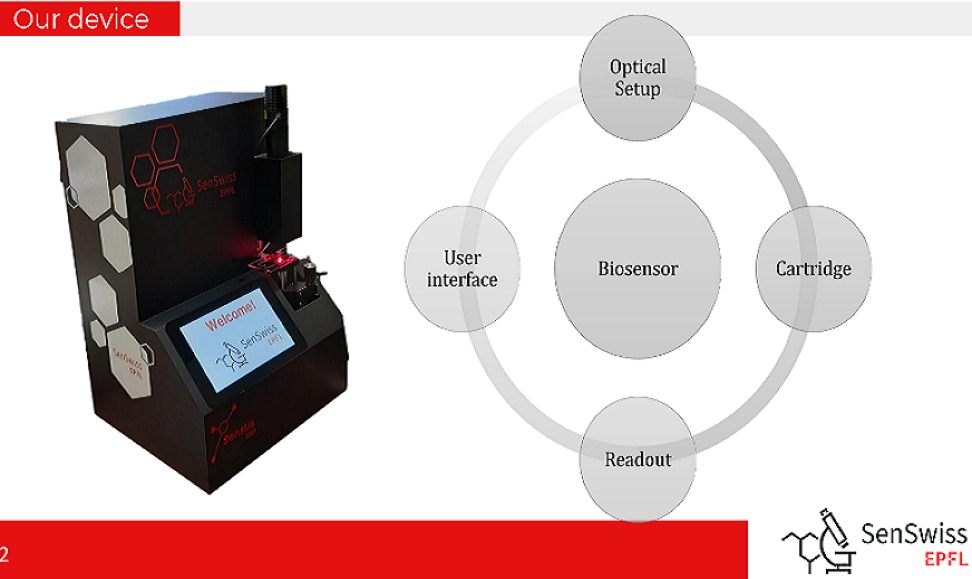
- * Technical member of SenSwis for SensUs Challenge 2021. 08/2021-09/2021. [Slide] [Report] [Media]
I am Ju Wu, a recent graduate of the MSc program in Robotics from École Polytechnique Fédérale de Lausanne (EPFL), having completed my degree in October 2022. During my time at EPFL, I had the privilege of conducting my master thesis in the ICT4M Lab under the expert guidance of Prof. Dimitrios Kyritsis and Dr. Xiaochen Zheng. Prior to this, I completed my BEng in Automation with the highest honors (5%) from Harbin Institute of Technology (HIT), where I was fortunate to be part of the Research Institute of Intelligent Control and Systems, under the mentorship of Prof. Huijun Gao. I have had the opportunity to collaborate with individuals from diverse backgrounds, which has allowed me to develop a range of skills and approaches to working with others. As a result, I am confident in my ability to contribute effectively to group projects in various capacities, whether as a team player, leader or even as a change maker. Furthermore, I have also honed my ability to work independently while balancing the interests and needs of different stakeholders. In my spare time, I enjoy hiking, swimming, and playing table tennis with friends.
Interests
- * System modelling, simulation and control
- * Information and communications technology for intelligent systems
- * Signal and image processing
- * Machine learning and optimization
- * Biomedical applications and neuroprosthetics
- * Social computing and biometrics
Education
-
Master of Science in Robotics. Track of Mobile Robot
09/2020-10/2022. [Master Course Description]
Overall 5.19/6. [Thesis] 6/6
École polytechnique fédérale de Lausanne (EPFL) -
Bachelor of engineering in Automation.
09/2015-07/2019. [Bachelor Course Description]
Overall 90.18/100 Rank 1st/37
Harbin Institute of Technology (HIT)